
ZÁPADOČESKÁ UNIVERZITA V PLZNI
Semestrální práce z předmětu PŘENOS DAT na téma
15.
PLESIOCHRONNÍ A SYNCHRONNÍ
PŘENOSOVÉ KANÁLY
Michal Calta
A03077
17.11.03
Ke sdružení většího počtu digitálních komunikačních kanálů, případně k přenosu
dat vyšších přenosových rychlostí, byla vytvořena celá soustava zařízení a jim
odpovídajících signálů vyšších řádů. Podle metody sdružování rozeznáváme
digitální systémy PDH a SDH.
Plesiochronní digitální hierarchie (PDH) se nazývá proto, že sdružované signály nemají oproti signálu vyššího řádu definován pevný časový vztah, čili není určen vztah mezi rámcem signálu vyššího řádu oproti rámcům sdružovaných signálů nižšího řádu. V signálu vyššího řádu je navíc vyčleněna určitá rezerva pro odchylky přenosových rychlostí, protože se nepředpokládá přesný časový souběh sdružovaných signálů, ale uvažuje se diference přenosových rychlostí v určitých předepsaných mezích.
V plesiochronní hierarchii prokládáme jednotlivé sdružované signály bit po bitu do rámce signálu vyššího řádu, aniž by byl jakýkoli definovaný vztah mezi rámcem signálu nižšího řádu a rámcem signálu vyššího řádu.
K signálům nižšího řádu se tedy dostaneme opět postupným demultiplexováním, což při mnohonásobně opakovaných operacích multiplexování a demultiplexování na různých hierarchických úrovních a v řadě po sobě následujících uzlech sítě, jak se později ukázalo, může vést k degradaci signálu (např. časové skluzy a vznik chyb).
Zjednodušený princip ukazuje obr. 1.1. Sdružovací zařízení multiplexuje čtyři signály nižšího řádu (platí pro evropskou oblast) a vkládá navíc pomocné informace, zejména skupinu rámcové synchronizace SRS a vyrovnání přenosových rychlostí. Časové průběhy zjednodušeně ukazuje obr. 1.2. Příspěvkové bity jednotlivých signálů nižšího řádu se periodicky řadí za sebe.
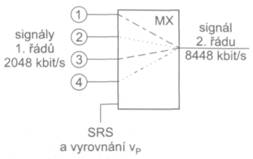
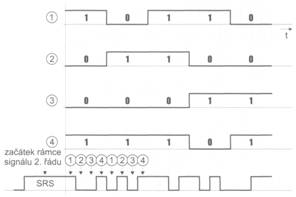
Obr 1.1 Sdružování signálů v PDH Obr 1.2 Časové průběhy při sdružování
Uvedený princip by fungoval, kdyby všechny signály byly synchronní. Jak ale bylo uvedeno, nepočítá se s takovým ideálním stavem, protože by neodpovídal praxi. Ve chvíli, kdy by u příspěvkového signálu došlo ke zvýšení přenosové rychlosti, by totiž docházelo ke ztrátě některých bitů sdružovaných signálů. Obr. 1.3 demonstruje uvedený případ a zároveň ukazuje, jak se v PDH taková situace řeší, protože při sdružování si nemůžeme dovolit žádný bit ztratit. Na obr. 1.3a je znázorněn časový tok bitových míst v signálu vyššího řádu, která máme rezervována pro uvažovaný signál nižšího řádu. Ten má, jak vidíme na obr. 1.3b, vyšší přenosovou rychlost (předbíhá) a v určitém čase bychom museli jeden bit vypustit. Řešení je prosté. Počet bitových míst v signálu vyššího řádu volíme vyšší (s rezervou), než je počet míst odpovídající nejvyšší okamžité přenosové rychlosti příspěvkového signálu (v rámci předepsané tolerance). Obr. 1.3c ukazuje, že rezerva je dostatečná, naopak dochází k tomu, že určité bitové místo nebude využito.
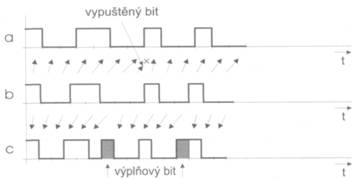
Obr. 1.3 Princip kladného stuffingu
Dojde k vyplnění nevyužitého místa pomocným bitem. Odtud pochází i používaný anglický název této metody - stuffing (vycpávání). Konkrétně v naznačeném případě došlo ke kladnému stuffingu. Dále existuje i záporný stuffing a kombinovaný (oboustranný), o kterém bude pojednáno u synchronní digitální hierarchie.
V rámci signálu vyššího řádu je přesně definováno bitové místo, na němž se provádí stuffing. Současně se vysílají řídicí bity stuffingu, které informují o tom, zda byl stuffing proveden (je-li na místě stuffingového bitu S užitečná informace či výplň). Uvedený příklad pro rámec signálu 2. řádu, který je zvykem kreslit do čtyř řádek pod sebe, přičemž jeho vysílání probíhá postupně po řádcích zleva doprava (obr. 1.4). Začne se SRS (t = 0) a skončí vpravo dole (t = 100 ms). Začátky dalších řádků obsazují řídicí bity stuffingu C1, až C4 (pro každé místo S1, až S4), které se třikrát zopakují (k zajištění bezchybného příjmu). Bit stuffingu je rezervován zvlášť pro každý sdružovaný signál (l až 4). Jeden rámec se odvysílá za dobu přibližně 100 ms a jednotlivé rámce na sebe bezprostředně navazují.
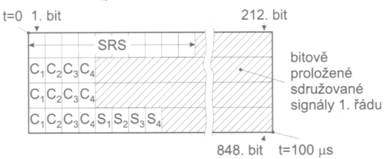
Obr. 1.4. Skladba rámce signálu 2. řádu
Signály vyšších řádů se vytvářejí obdobně. Tab. 1.1 uvádí přehled do 4. řádu s uvedeným maximálním počtem kanálů s přenosovou rychlostí 64 kbit/s (např. telefonních).V amerických a japonských digitálních sítích je hierarchie vystavěna rozdílně - na systému PCM24 s přenosovou rychlostí l 544 kbit/s (multiplexováno 24 kanálů; v Evropě PCM30/32 – označován též E1, viz [2]). To nese komplikace při spolupráci mezi telekomunikačními zařízeními při mezikontinentálních přenosech.
|
Označení |
Označení rozhraní |
Počet kanálů nižšího stupně |
Přenosová rychlost [kbit/s] |
|
|
RM0 |
|
64 - |
|
E1 |
RM1 |
30 |
2 048 - |
|
E2 |
RM2 |
4 |
8 448 - |
|
E3 |
RM3 |
4 |
34 368 - |
|
E4 |
RM4 |
4 |
139 264 - |
Tab. 1.1 Hierarchické stupně PDH
Postupem doby rostly nároky na kapacitu přenosových prostředků, a to nejen díky rozmachu telefonního provozu, ale zejména z důvodu prudkého nárůstu požadavků na přenos dat. Přidávání dalších stupňů do plesiochronní digitální hierarchie by nebylo efektivní a ani technicky schůdné. Bylo nutné vytvořit novou hierarchii na odlišných principech, která by navíc byla celosvětově standardizována. Tak vznikla synchronní digitální hierarchie, s těmito hlavními znaky:
· používá se řízené prokládání po celých bytech (8 bitů), takže pomocí adresace informačního pole tzv. ukazatelem se lze dostat k žádané informaci (kanálový interval) i v rámcích signálů vyšších řádů,
· veškeré signály v SDH se multiplexují synchronně s pevným časovým vztahem mezi signálem vyššího a nižšího řádu,
· počítá se s vysokými přenosovými rychlostmi, nejnižší stupeň SDH začíná přibližně v oblasti, kde PDH končí (140-155 Mbit/s),
· standardizovaným přenosovým médiem je optické vlákno dovolující vysoké přenosové rychlosti až desítek Gbit/s (s pomocí vlnového muldexu WDM až Tbit/s, viz [1] ),
· standardizovaný způsob řízení přenosové sítě a pružné zajištění bezchybného provozu i při poruchách.
Pro větší flexibilitu multiplexování a sjednocení evropské a americké hierarchie obsahují však rámce SDH více pomocných a výplňových informací (tzv. záhlaví).
Celosvětově standardizovaná technologie SDH vychází z amerického standardu SONET (Synchronous Optical Network), kde signálu STM-1 synchronní digitální hierarchie v podstatě odpovídá druhý hierarchický stupeň STS-3.
Základní signály synchronní digitální hierarchie se nazývají synchronní transportní moduly STM-N, kde N vyjadřuje hierarchický stupeň. Nejnižší v hierarchii je STM-1, další se tvoří sdružováním vždy čtyř signálů nižšího řádu, takže následují STM-4, STM-16, STM-64. Číslo N nám tedy udává, do kolika signálů STM-1 lze STM-N demultiplexovat.
Rámec STM-1 se kreslí podobně jako rámce signálů vyšších řádů v PDH ve tvaru tabulky, kde jednotlivé byty po sobě následují po řádcích zleva doprava. U STM-1 máme 9 řádků po 270 bytech (obr. 2.1). Prvních 9 bytů každého řádku nese pomocnou informaci (záhlaví): v prvním řádku synchroskupinu rámcového souběhu, dále zabezpečení, služební a řídicí datové kanály, ve čtvrtém řádku ukazatel atd. Zbylých 261 bytů každého řádku tvoří informační pole pro přenos signálu (tzv. užitečné zátěže) v podobě tzv. virtuálního kontejneru VC-4. Kontejnerem se v SDH nazývá rámec bezprostředně určený pro přenos signálů. Virtuální proto, že nemá v informačním poli STM-1 stálou polohu, ale na základě hodnoty ukazatele může začínat kdekoli v informačním poli.
U všech hierarchických stupňů a multiplexních jednotek v SDH je důsledně udržována délka rámce 125 ns jako u PCM 1. řádu, viz [2].
Přenosovou
rychlost můžeme snadno spočítat, vynásobíme-li rozměry tabulky počtem bitů v
bytu a opakovači frekvencí rámců (8 kHz):
![]() .
.
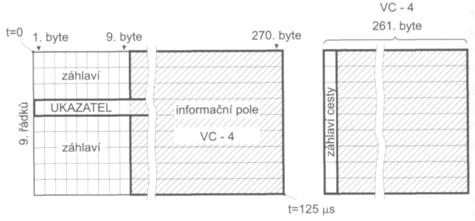
Obr. 2.1 Rámec STM1
Přenosové rychlosti signálů vyšších řádů budou narozdíl od PDH vždy přesným čtyřnásobkem (tab. 2.1).
Signály nižších řádů se prokládají synchronně po bytech v signál vyššího řádu (ve schématickém znázornění struktury rámce se proloží sloupce tabulky). Tabulka bude mít vždy 9 řádek, počet bytů v řádku poroste v násobcích čtyř (např. u STM-4 celkem 1080 bytů, z toho 36 záhlaví a 1044 informační pole).
|
STM-1 |
STM-2 |
STM-3 |
STM-4 |
|
155,52 Mbit/s |
622,08 Mbit/s |
2 488,32 Mbit/s |
9 953,28 Mbit/s |
Tab. 2.1 Hierarchické stupně SDH
Poměrně složitá vnitřní multiplexní struktura SDH počítá se začleňováním nejrůznějších typů signálů PDH evropské, americké i japonské hierarchie. Z těchto důvodů bylo vytvořeno jemnější členění rámce STM-1 na nižší multiplexní jednotky, které lze různě kombinovat, aby se dosáhlo univerzálnosti použití. Základní jednotkou je již zmíněný virtuální kontejner (nese přenášený signál). Rozlišují se číselně podle řádu (l až 4), případně typu.
Virtuální kontejner VC-4 vyplňuje celé informační pole STM-1 2349 bytů (viz obr. 2.1). Do VC-4 se může uložit signál PDH 4. řádu 140 Mbit/s. K signálu se připojuje záhlaví cesty, které s ním putuje společně od uložení do VC až na místo určení.
Signál STM-1 může přenášet jediný signál PDH 4. řádu.
Prostřednictvím virtuálního kontejneru VC-3 lze přenést signál PDH 3. řádu 34 Mbit/s (obr. 2.1) opět společně se záhlavím cesty. Přidáním ukazatele k virtuálnímu kontejneru VC3 vznikne příspěvková jednotka TU-3 (Tributary Unit).
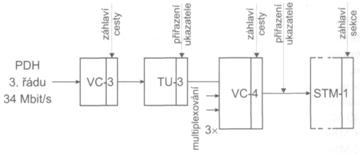
Obr. 2.2 Začleňování PDH 3. řádu
Tři příspěvkové jednotky TU-3 se multiplexují prokládáním po bytech a uloží se do VC-4. Ten tvoří užitečný náklad signálu STM-1, jak bylo výše uvedeno. Signál STM-1 může přenášet nejvýše tři signály PDH 3. řádu.
Signál PCM30/32 - 2048 kbit/s se ukládá, jak je vidět na obr. 2.3, do kontejneru VC-12 (čteme jedna-dva, nikoli dvanáct, neboli kontejner 1. řádu, druhého druhu). Signál PDH 2.řádu přeskakujeme záměrně, protože z důvodu zjednodušení multiplexní struktury se s jeho přímým ukládáním nepočítá. Podobně vynecháváme virtuální kontejner VC-2, který v evropské hierarchii nemá využití. Přidáním ukazatele získáme příspěvkovou jednotku TU-12. Multiplexováním tří příspěvkových jednotek vzniká skupina příspěvkových jednotek a dalším multiplexováním, tentokrát s násobkem sedmi vzniká skupina příspěvkových jednotek, která je stejného řádu jako VC-3. Konečně multiplexováním do VC-4 je dokončeno naplnění informačního pole signálu STM-1. Časové polohy příspěvkových signálů se označují kombinací X-Y-Z v souladu s multiplexováním ve třech stupních.
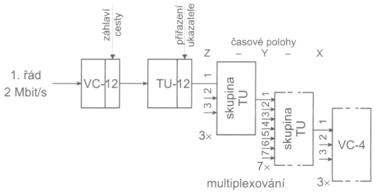
Obr. 2.3 Začleňování PCM 1.řádu
Postupným multiplexováním lze do rámce STM-1 začlenit 3x7x3=63 příspěvkových signálů PCM30/32, případně jejich kombinace se signálem PDH 3. řádu.
Shrneme-li poznatky z předchozích odstavců, lze signálem STM-1 přenášet některou z následujících kombinací příspěvkových signálů PDH:
• l x 140 Mbit/s,
• 3 x 34 Mbit/s,
• 63 x 2 Mbit/s,
• l x 34 Mbit/s + 42 x 2 Mbit/s,
• 2 x 34 Mbit/s + 21 x 2 Mbit/s.
Kapacita vyšších hierarchických stupňů SDH STM-N je daná násobkem N.
Vedle signálů PDH se počítá s dalšími typy signálů, z nichž nejvýznamnější je tok ATM buněk, který se obvykle ukládá přímo do VC-4. STM-1 a STM-4 jsou standardizovanými rozhraními přepojovačů ATM buněk. ATM asynchronní přenosový mód je základem širokopásmových sítí integrovaných služeb B-ISDN (viz [3]).
Ukazatel PTR (Pointer), který adresuje začátek virtuálního kontejneru VC-4 v rámci informačního pole STM-1, plní dvě základní funkce:
• vyrovnávání fázových rozdílů při přenosu,
• vyrovnání přenosových rychlostí při přepojování virtuálních kontejnerů.
Vedle toho se vyskytuje ukazatel i na úrovni virtuálních kontejnerů VC-3 a VC-12, avšak pro potřeby výkladu se budeme zabývat jen VC-4. Tento ukazatel je umístěn ve čtvrtém řádku záhlaví (obr. 2.1).
Funkci ukazatele bude demonstrována na příkladu cesty signálu 140 Mbit/s uloženého ve VC-4 přenosovou sítí (obr. 2.4) od uzlu A přes B do uzlu C. V uzlu B přepojujeme VC-4 vyjmutý z rámce STM-1 taktovaného od uzlu A frekvencí f1 do rámce STM-1 taktovaného frekvencí f1 směrem k uzlu C. Ukazatel bude nabývat různých hodnot v závislosti na vztahu frekvencí f1 a f2. Nejprve uvažujme, že uzly A a B jsou taktovány z centrálního generátoru taktu f0. Oba uzly běží synchronně s frekvencí f0 = f1 = f2. Vlivem různě velkého zpoždění při šíření taktovacího signálu na různě dlouhých přenosových cestách musíme však vyrovnávat fázové posuvy.
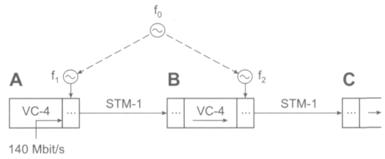
Obr. 2.4 Uspořádání části sítě pro vysvětlení funkce ukazatele
Začátek rámce signálu STM-1 ve směru B-C bude např. o 28 ms zpožděn za začátkem rámce STM-1 ve směru A-B podle obr. 2.5, který ukazuje nepřetržitý sled rámců obou signálů. Požadujeme, aby signál PDH 4.řádu uložený ve VC-4 procházel kontinuálně s minimálním zpožděním.
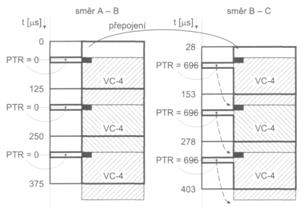
Obr. 2.5 Vyrovnání fázových rozdílů ukazatelem
Začátky VC-4, které přepojujeme ze směru A-B do B-C, si proto časově odpovídají (začátek označen černě), relativně však mají v rámcích jinou polohu. Předpokládáme pro jednoduchost, že v STM-1 A-B se začátek VC-4 kryje s nultou pozicí v informačním poli (adresa 0 - ukazatel PTR=0 odpovídá pozici v informačním poli ve 4. řádce hned za ukazatelem). Přepojením v reálném čase bez zpoždění se začátek VC-4 ocitne na pozici 696 v informačním poli STM-1 B-C, což vyjadřuje ukazatel PTR=696 (informační pole je číslováno od pozice 0 postupně po řádcích, ukazatel udává pozici začátku VC-4, který nejblíže následuje - v našem případě shodou okolností již v následujícím rámci).
Pokud budou oba signály taktovány stejnou frekvencí a budou mít tedy přesně stejnou přenosovou rychlost, bude fázový rozdíl konstantní a hodnota ukazatele bude stále stejná. Ukazatel PTR tedy číselné udává velikost fázového posuvu mezi VC-4 a rámcem signálu STM-1.
Složitější situace nastane, když taktovací frekvence budou různé a různé budou i přenosové rychlosti STM-1. Nejprve pro f1<f2 (obr. 2.6), kdy signál ve směru B-C stále předbíhá signál A-B, což se projevuje na nižší délce rámce (124,85 ms). Je vidět, že jednu pozici v informačním poli vynecháváme (v daném čase na ní nemáme co uložit). Tato pozice je přesně definovaná adresou 0 hned v řádku za ukazatelem. Podobně jako u PDH došlo k jejímu vyplnění neužitečnou informací čili provedl se kladný stuffing. V následujícím rámci začíná VC-4 o jednu pozici dále. Ukazatel STM-1 B-C se novým podmínkám přizpůsobí, zvětší se o jedničku a ukazuje aktuální polohu začátku VC-4 (696+1=697).
Při f1>f2 (obr. 2.7), kdy se signál ze směru B-C zpožďuje za signálem A-B, což se projevuje větší délkou rámce (125,15 ms), dochází naopak k situaci, kdy nestačí místo v informačním poli. Abychom neztratili část přenášeného signálu, ukládá mé jej na určené místo mimo informační pole společně s ukazatelem. Provedl se záporný stuffing a ukazatel snižuje svou hodnotu o jedničku. Podle potřeby se tedy provádí buď kladný, nebo záporný stuffing, použitou metodu nazýváme souhrne kombinovaným stuffingem.
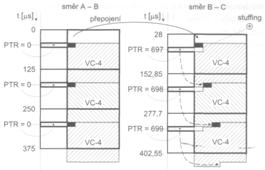
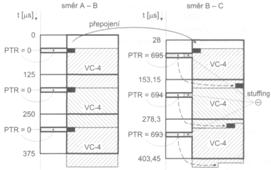
Obr. 2.6 Vyrovnání přenosových rychlostí pro f1<f2 Obr. 2.7 Vyrovnání přenosových rychlostí pro f1>f2
Pomocí dynamických změn ukazatele dokážeme vyrovnávat přenosové rychlosti mezi signály v rámci STM signálů.Ve skutečnosti jsou odchylky taktovacích frekvencí malé a nepočítá se, že k vyrovnání dojde dříve než po třech rámcích. Adresování informačního pole se provádí po trojicích bytů.
Pomocí ukazatele se dokáže zařízení SDH orientovat v rámci a vždy ví, kde začíná příslušný virtuální kontejner. Vlivem změn ukazatele virtuální kontejnery „plavou“ v rámci STM. Podobná je situace u kontejnerů nižšího řádu VC-3 a VC-12, kde pracuje ukazatel nižší úrovně na stejném principu.
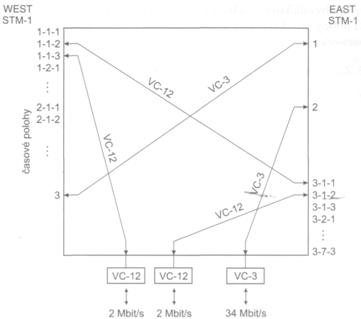
Síťové uzly SDH (uzly přenosové sítě SDH) mají jednotnou skladbu a výrobci je konstruují jako univerzální stavebnice, kde volbou typu a počtu zásuvných karet volíme funkci: opakovač, ukončující muldex, vydělovací muldex, digitální rozvaděč (Cross-connect) apod. Nejčastěji se můžeme setkat s vydělovacím muldexem ADM (Add-Drop Muldex), jehož blokové schéma je na obr. 2.8.
Na první pohled je patrný průběžný směr přenosu zleva doprava a naopak mezi linkovými rozhraními STM-1, označenými podle světových stran z angličtiny West a East (formální označení neodpovídá zeměpisným světovým stranám). Zdola přivádíme příspěvkové signály, které chceme přepravovat sítí, např. PDH 140 Mbit/s, 34 Mbit/s, 2 Mbit/s. Jádrem zařízení je digitální přepojovač, přes který jde veškerý provoz přenosového uzlu. Pro zajištění spolehlivosti se obvykle zálohuje druhým shodným přepojovačem, na nějž se přepne provoz v případě výpadku prvního. Přepojovač se realizuje jako časoprostorové spojovací pole, které pracuje na úrovni všech potřebných multiplexních jednotek VC-4, VC-3, VC-12. Schématické znázornění možného propojení ukazuje obr. 2.9, kde jsou naznačeny jednotlivé časové polohy (Time Slot) uvnitř signálu STM-1. Virtuální kontejner VC-12 prochází průběžně z časové polohy STM-1 West 1-1-1 do polohy STM-1 East 3-1-1. Příspěvkový signál 2 Mbit/s začleňujeme prostřednictvím VC-12 do STM-1 East v časové poloze 3-1-2 atd. (značení x-y-z podle obr. 2.3).
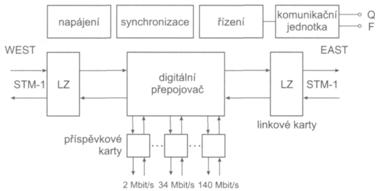
Obr. 2.8 Blokové schéma vydělovacího muldexu
Obr. 2.9 Schématické znázornění propojení přes digitální přepojovač
Digitální přepojovač umožňuje operativní přizpůsobování přenosové sítě okamžitým provozním potřebám. Jeho nastavení provádí dohledový systém prostřednictvím řídicí a komunikační jednotky a dohledové sítě.
Na rozhraní F obr.2.8 (sériový port - rozhraní V.24/V.28) je možno připojit místní servisní terminál (počítač PC). Rozhraní Q připojuje zařízení k dohledové síti (např. rozhraní Ethernet sítě LAN), přičemž k dálkovému dohledu uzlů sítě se používá datových kanálů v záhlaví signálu STM. Z jediného centra vybaveného dohledovým počítačem (pracovní stanicí UNIX) lze získat informace (nastavení, poplachová hlášení) a provádět zásahy (změna konfigurace, servisní zásahy) dálkově ve všech uzlech přenosové sítě. Uvedená rozhraní jsou součástí normy pro dohledové a řídicí sítě TMN (Telecommunications Management Network).
Popsaný vydělovací muldex se prakticky nasazuje do sítí, ve kterých je nejčastější základní topologickou jednotkou kruhová síť. Propojením linkových rozhraní West-East získáme kruh podle obr. 2.10. Přenosovou cestu tvoří dvojice vláken, každé projeden směr přenosu.
Kruhová síť zajistí spolehlivější provoz v případě poruch, protože mezi dvěma libovolnými uzly existují právě dvě cesty pro přenos signálu.
Pracovní cesta se používá standardně, na ochrannou se provoz přepne v případě poruchy, např. přerušení vlákna. Nejčastěji mechanismus pracuje tak, že příspěvkový signál např. 2Mbit/s prostřednictvím VC-12 přenášíme současně po obou stranách kruhu (z uzlu A do C přes uzel B i D) a na přijímací straně sledujeme kvalitu obou došlých signálů. Vybíráme ten s lepší kvalitou (nižší chybovostí).
Přenosová síť je podle geografických oblastí vhodně rozčleněna do podsítí (sub-sítí) a jednotlivé podsítě jsou vzájemně pospojovány sítí vyšší úrovně.
Pro ještě účinnější zajištění spolehlivosti provozu lze použít tzv. ochranu multiplexní sekce, která spočívá ve zdvojení přenosové cesty včetně linkových zakončení. Dále se počítá s využitím dynamického přizpůsobování přenosové sítě aktuálním potřebám prostřednictvím dohledového systému, který samočinně bez zásahu obsluhy vyhledá optimální obchozí trasy a přesměruje provoz přenastavením digitálních přepojovačů v síťových uzlech.
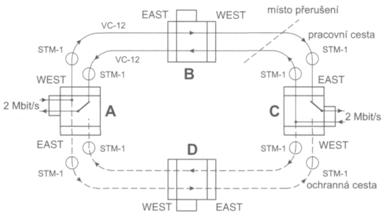
Obr. 2.10 Kruhová přenosová síť SDH
Literatura:
[1] Svoboda, J. a kolektiv - Telekomunikační technika Díl 1., Praha, Sdělovací technika, 1999
[2] Svoboda, J. a kolektiv - Telekomunikační technika Díl 2., Praha, Sdělovací technika, 1999
[3] Svoboda, J. a kolektiv - Telekomunikační technika Díl 3., Praha, Sdělovací technika, 1999
[4] Sobotka,V. - Přenosové systémy, Praha, ČVUT, 1991,
[5] Kocourek, P. – Přenos informace, Praha, ČVUT, 1994.